Robot Rasaerba Solare
Robot rasaerba alimentato a batteria e dotato di pannello solare da 10 watt. La batteria si ricarica tramite il pannello solare oppure tramite l’apposita base di ricarica. Lo chassis è realizzato in ABS stampato con una stampante 3D, per il movimento utilizza due motoriduttori, ai quali sono montate due ruote da 150 mm di diametro e due ruote pivottanti sulla parte anteriore. Una lama in nylon da 255 mm di diametro, fissata all’albero di un potente motore (fissato al centro del robot), permette il taglio dell’erba. La lama è dotata di protezione e da un sistema di sensori che la bloccano immediatamente per evitare che qualcuno possa entrare in contatto durante il funzionamento. Vari sensori ad ultrasuoni, infrarossi e di urto, permettono di rilevare gli ostacoli, mentre un particolare sensore permette al robot di sapere dove tagliare senza uscire dal perimetro impostato. Il robot può essere controllato anche con un radiocomando per modellismo o un controller per playstation.

Le dimensioni del robot Rasaerba sono di 495x340x195 mm (lunghezza – larghezza – altezza), è basato su una scheda Arduino Uno con uno shield realizzato appositiamente per il controllo del movimento, la gestione dei sensori e delle bobine per il rilevamento del filo interrato, il pannello solare e la lama. Mentre uno shield permette di controllare il movimento dei due motoriduttori a 12 volt, in grado di girare con una velocità max. di 23 giri al minuto e dotati di una coppia di 100 Ncm. Due ruote da 150 mm di diametro e larghe 40 mm, sono montate sulla parte posteriore del robot e sono attaccate ai due motoriduttori tramite degli HUB. Sulla parte anteriore sono presenti due piccole ruote pivottanti. Nella parte superiore del robot è presente un pannello solare da 10 watt, che serve per ricaricare la batteria da 12V 2Ah. La lama per il taglio è una lama che si trova in commercio nei centri per il fai da te. È realizzata in nylon ad alta resistenza, ha un diametro di 250 mm e dispone di 3 denti. Questa lama è attaccata a un motore in corrente continua in grado di ruotare a una velocità di 21.000 giri al minuto. Il rilevamento degli ostacoli è affidato a due moduli ad ultrasuoni montati sulla parte anteriore e uno nella parte posteriore. Lateralmente sono presenti due sensori per rilevare gli urti. Nella parte inferiore del robot si trovano dei sensori di prossimità e sollevamento, questi sensori servono a bloccare la lama nel caso di sollevamento o ribaltamento del robot durante il funzionamento.
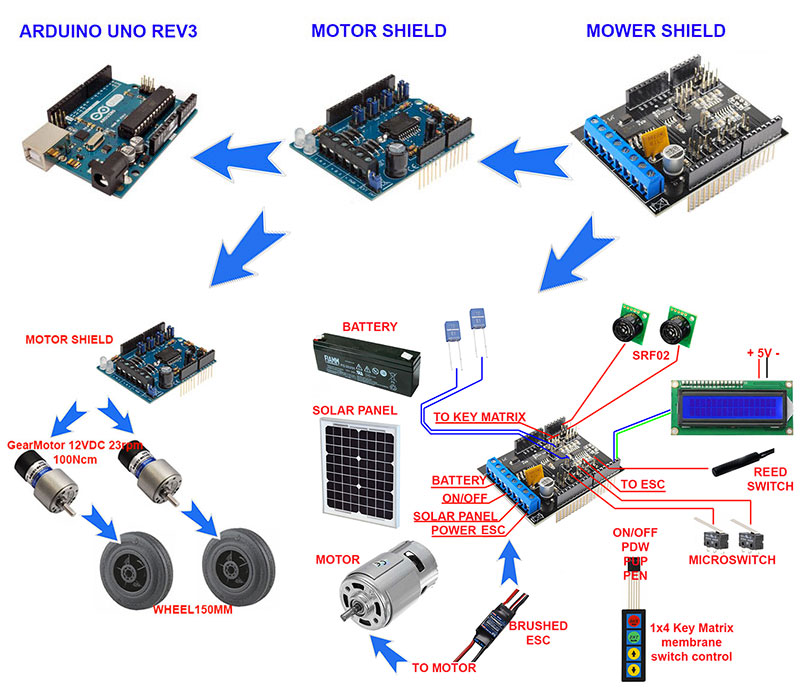
Elenco componenti utilizzati con i relativi link:
| QUANTITY | COMPONENT NAME | |
| 1 | × | MOWERSHIELD_FE SHIELD |
| 1 | × | Sealed lead-acid rechargeable battery 12 V – 2 AH |
| 2 | × | Wheel 150mm |
| 2 | × | Microswitch |
| 1 | × | Solar Panel 10 watt |
| 1 | × | 20A BRUSHED ESC |
| 1 | × | Arduino Uno Rev3 |
| 1 | × | Motor Shield for Arduino |
| 2 | × | Nylon Wheel 50mm |
| 1 | × | DC Motor 21.000 rpm |
| 1 | × | 1×4 Key Matrix membrane switch control keypad |
| 1 | × | DISPLAY LCD 16X2 I²C |
| 2 | × | SRF02 Ultrasonic range finder |
| 2 | × | GearMotor 12VDC 23rpm 100Ncm |
- SKETCH + LIBRARY: ho utilizzato e modificato questo sketch realizzato dal Sig. Mirco Segatello per la rivista Elettronica In (www.Elettronicain.it).
Sto preparando i file da scaricare per stampare le parti con la stampante 3D.